
Автор: MaFrance351
Всем привет!
Тот, кто хоть раз заглядывал в кабину локомотива или электропоезда, наверняка обращал внимание на машинистский клапан — ключевой орган управления тормозной системой. Это сложное пневматическое устройство регулирует давление в магистралях. В современных составах классические механические краны уступили место гибридным устройствам, сочетающим пневматику и электронику.
У меня давно была мечта — заполучить такой девайс, изучить его устройство и показать принцип работы. Наконец это удалось, и настало время вдохнуть в него новую жизнь, раскрыв весь его потенциал.

В этой статье мы подробно рассмотрим один из артефактов отечественного железнодорожного транспорта — кран машиниста №130. Мы разберемся, как устроен его контроллер, и пройдем все этапы восстановления. Вас ждет много технических деталей и практических советов.
❯ Разнообразие тормозных кранов

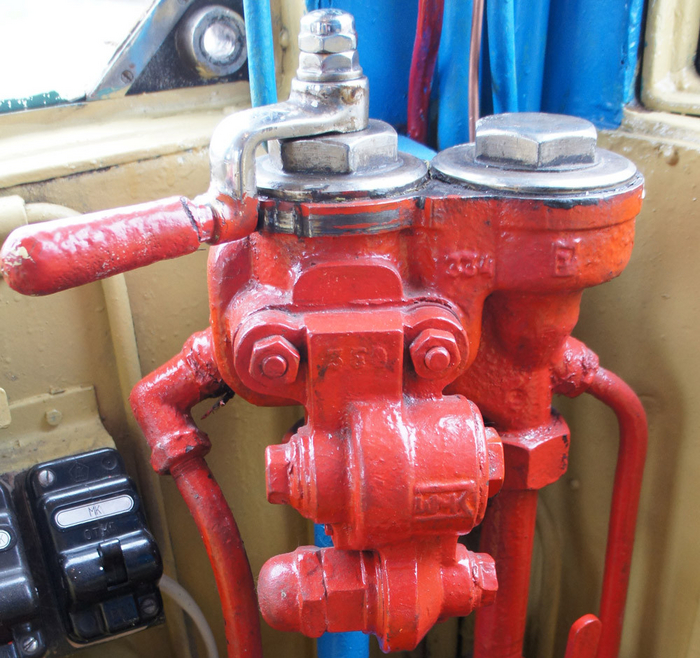
На железных дорогах исторически основными органами управления тормозами были краны машиниста моделей 394 и 395. С пневматической точки зрения это практически идентичные устройства. Ключевое отличие крана №395 — наличие электропневматического блока (тот самый круглый корпус сверху). На фото также виден вспомогательный тормозной кран №254, который используется для управления торможением непосредственно локомотива.
Ассортимент, конечно, не ограничивается двумя моделями. Например, кран №334, который применялся в вагонах метро, а еще раньше — на локомотивах и моторвагонном подвижном составе (МВПС). Эта модель имеет давнюю историю: согласно найденным данным, ее производство началось еще в 1904 году для оснащения паровозов.

Кран №013 сегодня можно встретить практически на всех новых вагонах метрополитена, а также на вагонах модели ПА1.

Отдельного внимания заслуживает своеобразный кран №172 (известный также как 4ВК). Он был специально разработан для трамваев с пневматическими тормозами, таких как ЛМ-68М, ЛВС-86К, РВЗ-6М2 и других.
❯ Что представляет собой кран №130?
Герой сегодняшнего обзора — это кран с дистанционным (электрическим) управлением. В отличие от своих предшественников, он представляет собой электронную систему, состоящую из контроллера в кабине машиниста и выносной пневматической панели в аппаратном отсеке. Согласно технической документации, он все равно классифицируется как Кран №395. Принципы работы кранов 394 и 395 уже хорошо описаны в сообществе, поэтому не будем на них подробно останавливаться.

Эти устройства устанавливаются на новый подвижной состав. В качестве примера можно взять кабину электропоезда ЭП2Д, где ручка этого крана расположена с правой стороны консоли (основные органы управления машиниста находятся слева).
А вот он же, но уже в кабине электровоза ЭП20.
Этот кран — продукт новой эпохи, в отличие от старых кранов прямого действия, разработанных полвека назад. Его активное внедрение началось только в 2000-х годах.
Однако электроника, как известно, иногда выходит из строя. Поэтому на случай отказа электронные краны всегда дублируются обычными кранами прямого управления. Резервный кран может быть скрыт под крышкой (как на фото) или расположен сбоку от пульта (как в новых поездах метро). Надежность таких электронных систем — предмет постоянных дискуссий, и многие специалисты отмечают, что она уступает чисто пневматическим аналогам.
❯ Внешний осмотр устройства
Вот тот самый экземпляр, который оказался у меня. Его демонтировали с одного из электровозов по причине неисправности. Несмотря на это, его внешнее состояние вполне удовлетворительное, что не может не радовать энтузиаста.
Крупный план с указанием элементов. Как и ожидалось, на корпусе красуется номер 395. Ручка переключения очень тугая, а ее движение сопровождается характерным уверенным щелчком.
Паспортная табличка. Изготовитель — ОАО «МТЗ-Трансмаш». Интересно, что все поля на табличке остались незаполненными.
Снизу ничего примечательного — только крышка, за которой когда-то располагался разъем для подключения.
❯ Изучаем внутреннее устройство
Ранее я уже писал о контроллерах машиниста. В них код позиции обычно задается с помощью кулачка, который нажимает на обычный микровыключатель. Однако в данном случае контроллер является бесконтактным.
Заглянем внутрь. К сожалению, самое печальное — оригинальная плата управления была извлечена предыдущими владельцами и до наших дней не сохранилась.
Обратите внимание: Оживляем контроллер машиниста от ушедшего в историю электропоезда.
Следовательно, для подключения этого устройства придется собирать управляющую электронику с нуля.Сердце контроллера — это рычаг, на конце которого закреплен магнит. Соответственно, на плате должны располагаться датчики Холла, которые будут считывать его положение.
А вот механизм переключения позиций остался традиционным — металлический диск с прорезями и ролики. Крайние положения переключаются особым образом: в позиции «Перекрыша» рычаг не фиксируется, а для перевода в «Экстренное торможение» требуется приложить значительное усилие.
❯ Создаем плату управления с нуля
Поскольку оригинальные платы больше не производятся, единственный способ подключить такой кран — собрать свою собственную схему.
В моих запасах нашлась коллекция старых макетных плат, произведенных в уже несуществующей ГДР. Некоторые из них совершенно пусты, другие хранят следы ушедшей эпохи — редкие радиодетали или элементы часовых механизмов. Как мне рассказывали, это запчасти от компьютеров Robotron. В любом случае, эти платы идеально подходят для использования в качестве основы для макетирования.
Для считывания положения рычага я решил использовать датчики Холла. В ход пошли SS495A, оставшиеся после экспериментов с магнитными кнопками для автомагнитолы Factorial. Всего потребуется семь датчиков — по одному на каждую позицию крана.
Также в схеме используется микросхема MAX485 для организации передачи данных (о причинах выбора расскажу позже) и проверенная временем Arduino на базе чипа LGT в качестве управляющего ядра.
Первым делом проверим, подходят ли выбранные датчики для нашей задачи. Тест показал, что они идеальны: неодимовые магниты контроллера обладают достаточной силой, чтобы сигнал с датчика опускался до нуля. При этом в соседних позициях датчик совершенно не реагирует на близлежащие магниты. Этот момент критичен. Изначально я хотел использовать герконы, но отказался от этой идеи именно из-за возможного одновременного срабатывания нескольких датчиков.
Следующий шаг — найти подходящую по размеру макетную плату, чтобы разместить ее внутри корпуса крана, и разметить на ней места для установки датчиков.
По нанесенной разметке припаиваем датчики, а затем подпаиваем к ним провода.
❯ Разработка прошивки для контроллера
Теперь переходим к программной части. Поскольку кран планируется использовать в составе домашней кабины-симулятора машиниста, возникла идея объединить все его модули через шину RS-485. Это позволит в будущем легко модифицировать систему, не переделывая аппаратную часть с нуля. Итак, пишем следующий скетч:
#define RX 9
#define TX 8
#define MAX485_DE 7
#define SEND 1
#define RECEIVE 0
#define DEVICE_ID 0x82
#define MIN_SENSOR_VALUE 100
#include
SoftwareSerial hostSerial(RX, TX); // Прием, передача
uint16_t hallReadings[7];
uint8_t getAbsolutePosition() {
for (int i = 0; i < 7; i++) {
hallReadings[i] = analogRead(i);
Serial.print("Канал ");
Serial.print(i + 1);
Serial.print(": ");
Serial.println(hallReadings[i]);
}
Serial.println();
for (int i = 0; i < 7; i++) {
if (hallReadings[i] < MIN_SENSOR_VALUE) {
return i + 1; // Возвращаем номер позиции (1-7)
}
}
return 0; // Если ни один датчик не активирован
}
void setup() {
Serial.begin(115200);
hostSerial.begin(4800);
pinMode(MAX485_DE, OUTPUT);
digitalWrite(MAX485_DE, RECEIVE);
}
void loop() {
uint8_t currentPos = 0, previousPos = 0;
currentPos = getAbsolutePosition();
if (currentPos != 0) {
previousPos = currentPos;
}
if (hostSerial.available()) {
if (hostSerial.peek() == DEVICE_ID) {
hostSerial.read();
digitalWrite(MAX485_DE, SEND);
hostSerial.write(previousPos);
digitalWrite(MAX485_DE, RECEIVE);
} else {
hostSerial.read();
}
}
}
Принцип работы прост: постоянно считываем показания датчиков и определяем текущую позицию. Если позиция изменилась (значение не равно нулю), сохраняем ее. Параллельно слушаем шину RS-485. Если приходит байт с идентификатором нашего устройства (0x82, что соответствует десятичному 130), мы переключаемся в режим передачи и отправляем в ответ код последней зафиксированной позиции.
❯ Финальная сборка и монтаж
Аппаратная часть почти готова, пора установить все внутрь крана.
Сначала проводим предварительную проверку на макете, убеждаясь, что датчики не создают помех и не препятствуют свободному ходу рычага.
Затем аккуратно размещаем плату внутри корпуса. После недолгих раздумий для фиксации был выбран «секретный ингредиент» всех мейкеров — термоклей. Его преимущество в том, что при необходимости (например, если вдруг найдется оригинальная плата) конструкцию можно будет легко разобрать. Провода укладываем так, чтобы они не мешали механике, после чего закрываем крышку. Можно проводить первые испытания.
❯ Выбор основного контроллера для ПК
Выяснилось, что изначально выбранная для этой роли плата Raspberry Pi Pico не совсем подходит. Несмотря на то что она эмулирует USB HID-устройство, в некоторых симуляторах (например, в «Метрострое») контроллер либо не работал вовсе, либо работал некорректно (позиции «залипали»). Причины этого поведения остались невыясненными.
Поэтому в качестве связующего звена между краном и компьютером была использована Arduino Micro. На нее был загружен скетч, использующий библиотеку Joystick.h для эмуляции джойстика. Проблем обнаружено не было. На собранной для нее плате установлена микросхема 74HC165 для опроса датчиков, два DIP-переключателя (пока не используются), все тот же MAX485 для связи с краном и разъемы для подключения других будущих модулей системы.
❯ Программное обеспечение и интеграция
Изначально кран был подключен к симулятору Trainz. Однако коллеги, имеющие опыт создания гоночных и железнодорожных симуляторов, порекомендовали обратить внимание на ZDSimulator.
Для его версии 54.006 было написано специальное программное обеспечение, которое позволяет переназначить управление поездом на обычный эмулированный джойстик.
Осталось только сопоставить физические позиции крана с виртуальными командами в симуляторе, запустить игру — и можно отправляться в путь.
❯ Итоги проекта
Таким образом, нам удалось восстановить еще один интересный артефакт из мира железных дорог, приблизив создание полноценного домашнего симулятора кабины машиниста на один шаг.
Я, конечно, уже опробовал управление с помощью этого крана. Ощущения совершенно уникальные и не сравнимые ни с джойстиком, ни, тем более, с клавиатурой. Тактильная отдача, точность позиционирования и реализм управления — на совершенно другом уровне.
На этом все.
Полезные ссылки и материалы
Краны машиниста 394 и 395: техническое описание
Кран машиниста 334: история и устройство
Кран машиниста 013: применение в метро
Руководство по эксплуатации крана №130
Программное обеспечение для интеграции с симуляторами
Статья подготовлена специально для читателей Timeweb Cloud и Pikabu. Больше интересных материалов вы найдете в нашем блоге на Хабре и Telegram-канале (статьи и новости из мира технологий).
Используя реферальную ссылку на облачный сервис Timeweb Cloud, вы помогаете развитию наших проектов.
Теги: Электроника, Железная дорога, Реставрация, Ардуино, Симуляторы, Геймдев, Пайка, Датчики Холла, RS-485, Кран машиниста
Больше интересных статей здесь: Гаджеты.
Источник статьи: Оживляем электронный кран машиниста от электровоза.